Ja, det är nästan för bra för att vara sant. En lång mek-eftermiddag med Lars möjliggjorde följande:
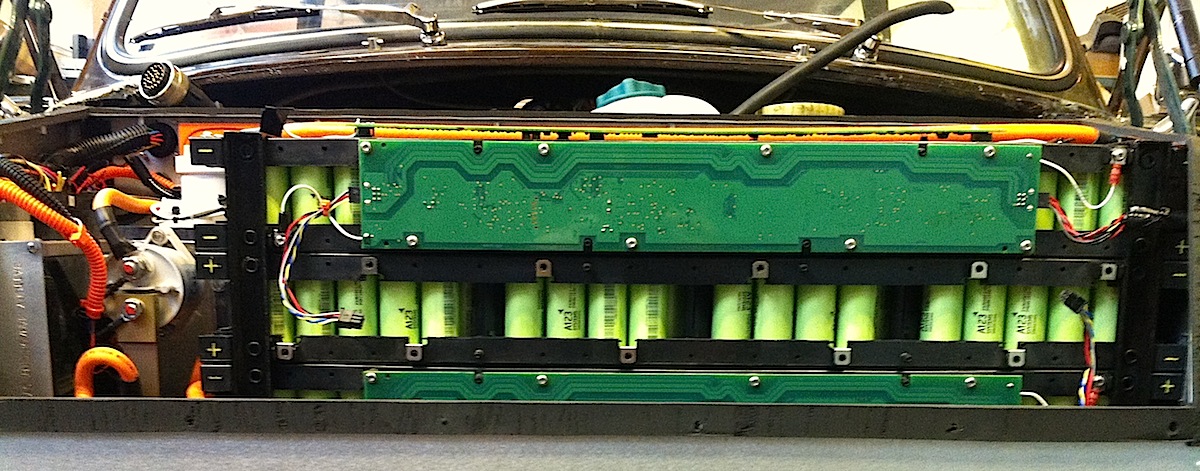
Det sista kritiska momentet med att ansluta HV-kablarna i främre- och bakre batteripack är gjort. Kritisk är det för att dessa kablar gör att batterierna nu har 90V respektive 270V spänning. Detta arbete skall inte utföras ensamt om olyckan skulle vara framme.
Lexan (polykarbonat) kåporna monterades, efter lite bråkande med passande håltagning för HV800-kontakten, kraftkontakten i det bakre batteriet.
Det glykol/vatten-baserade kylsystememet trycktestades för att hitta eventuella läckor.
En sista översyn av samtliga signalanslutningar i det främre batteriet utfördes.
Signalkablage mellan främre- och bakre batteri monterades. Några extra kablar drogs ut från detta kablage som skall in i kupén. 12V till elkylfläktarna i det bakre packet, de extra kontaktorernas styrning. Tyvärr glömde jag batteri-CAN som skall användas till CAN-displayen, men men det går att fixa senare.
En tätande knacklist i gummi monterades runt öppningen i bagagegolvet. Sen fram med pallyfteren och in med det bakre batteriet under bilen. Lite trix fram och tillbaka samt opp och ner med billyften och Yo, batteriet på plats. Ett gäng M8 bultar håller nu det bakre batteriet mot bakramen.
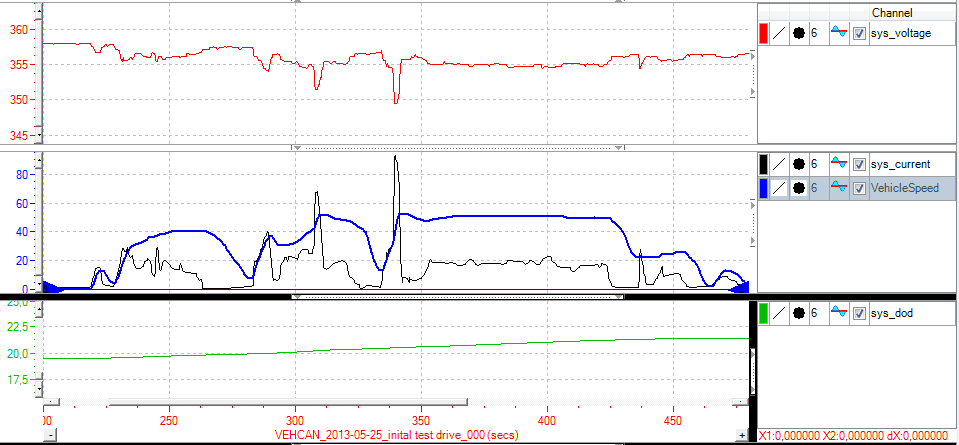
Slutligen testades styrningen av de extra kontaktorerna och att både elmotorinverter och BMS-Battery Management System, batteriets styrsystem kommunicerade på CAN. Värden visade 360V och 83% SOC. Men det var förhållande lite skillnad mellan cellernas spänning, trots att batterimodulerna stått uttråkade i mitt garage under en tid.
Lite kuriosa, BMS:et mäter och beräknar packspänning på tre sätt: summan av alla 108 cellspänningar, summan av alla 12 modulspänningar samt packspänning.
Några felflaggor aktiva i de båda systemen, bl.a. för att MSD:n var urkopplad. Men felsökning och driftsättning får bli ett senare inlägg.